আরডুইনোর সাথে BTS7960 43A Motor Driver ইন্টারফেসিং ও ব্যবহার গাইড
### পরিচিতি
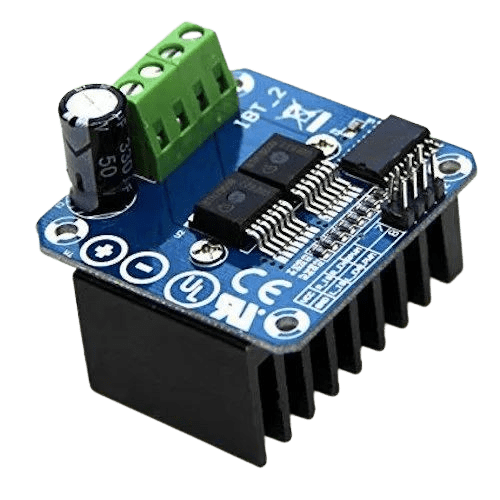
BTS7960 একটি হাই-পাওয়ার হাফ-ব্রিজ মোটর ড্রাইভার যা মূলত উচ্চ কারেন্ট বিশিষ্ট ডিসি মোটর নিয়ন্ত্রণের জন্য ব্যবহৃত হয়। এটি সর্বোচ্চ ৪৩ অ্যাম্পিয়ার কারেন্ট হ্যান্ডেল করতে পারে, যা বড় রোবট বা গাড়ির জন্য আদর্শ।
### প্রয়োজনীয় পার্টস
১. আরডুইনো উনো (Arduino Uno)
২. BTS7960 43A মোটর ড্রাইভার মডিউল
৩. ১২ভি ডিসি মোটর
৪. ১২ভি ব্যাটারি বা পাওয়ার সোর্স
৫. জাম্পার ওয়্যার
### সার্কিট কানেকশন
- **BTS7960 VCC** -> **Arduino 5V**
- **BTS7960 GND** -> **Arduino GND**
- **BTS7960 R_EN, L_EN** -> **Arduino 5V** (সর্বদা হাই রাখতে হবে)
- **BTS7960 R_PWM** -> **Arduino D9**
- **BTS7960 L_PWM** -> **Arduino D10**
- **BTS7960 B+ ও B-** -> **১২ভি ব্যাটারি**
- **BTS7960 M+ ও M-** -> **ডিসি মোটর**
### কিভাবে কাজ করে
এই ড্রাইভারটি PWM সিগন্যালের মাধ্যমে কাজ করে। যখন R_PWM পিনে সিগন্যাল পাঠানো হয়, মোটর এক দিকে ঘোরে এবং L_PWM পিনে সিগন্যাল পাঠালে মোটর উল্টো দিকে ঘোরে। আরডুইনোর `analogWrite()` ফাংশন ব্যবহার করে আমরা মোটরের গতি নিয়ন্ত্রণ করতে পারি।
কানেকশন ও সার্কিট ডায়াগ্রাম (Connection Diagram)

প্রোগ্রাম কোড (Source Code)
// BTS7960 পিন কনফিগারেশন
int R_PWM = 9;
int L_PWM = 10;
void setup() {
// পিনগুলোকে আউটপুট মোডে সেট করা হচ্ছে
pinMode(R_PWM, OUTPUT);
pinMode(L_PWM, OUTPUT);
}
void loop() {
// মোটর সামনের দিকে ঘোরান (গতি ২০০)
analogWrite(R_PWM, 200);
analogWrite(L_PWM, 0);
delay(2000);
// মোটর থামানো
analogWrite(R_PWM, 0);
analogWrite(L_PWM, 0);
delay(1000);
// মোটর উল্টো দিকে ঘোরান
analogWrite(R_PWM, 0);
analogWrite(L_PWM, 200);
delay(2000);
}
..., ... থেকে
...এইমাত্র অর্ডার করেছেন • ...