আরডুইনোর সাথে L293D Motor Control Shield ইন্টারফেসিং ও ব্যবহার গাইড
### পরিচিতি
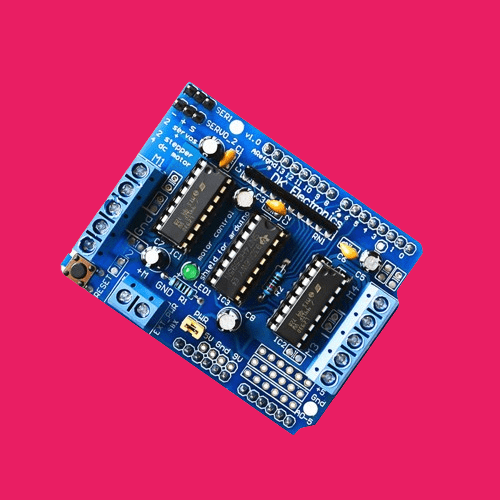
L293D মোটর ড্রাইভার শিল্ড হলো একটি শক্তিশালী মডিউল যা আরডুইনোর সাথে যুক্ত হয়ে একসাথে একাধিক ডিসি মোটর বা স্টেপার মোটর নিয়ন্ত্রণ করতে পারে। এটি মূলত H-Bridge সার্কিটের ওপর ভিত্তি করে তৈরি, যা মোটরকে সামনে এবং পেছনে উভয় দিকে ঘোরানোর সুবিধা দেয়।
### প্রয়োজনীয় পার্টস
১. আরডুইনো উনো (Arduino Uno)
২. L293D মোটর শিল্ড
৩. ডিসি মোটর (১ বা ২ টি)
৪. পাওয়ার সাপ্লাই (৯ ভোল্ট ব্যাটারি)
৫. জাম্পার ওয়্যার
### সার্কিট কানেকশন
১. L293D শিল্ডটিকে আরডুইনোর ওপর সরাসরি বসিয়ে দিন।
২. শিল্ডের পাওয়ার টার্মিনালে এক্সটার্নাল ব্যাটারি (৯-১২ ভোল্ট) কানেক্ট করুন (পজেটিভ (+) VCC-তে এবং নেগেটিভ (-) GND-তে)।
৩. ডিসি মোটরটির দুটি টার্মিনাল শিল্ডের 'M1' অথবা 'M2' পোর্টে কানেক্ট করুন।
৪. আরডুইনোকে USB ক্যাবলের মাধ্যমে কম্পিউটারে যুক্ত করুন।
### কিভাবে কাজ করে
L293D চিপটি একটি H-Bridge হিসেবে কাজ করে। আরডুইনোর ডিজিটাল পিনগুলো থেকে সংকেত পাওয়ার পর শিল্ডটি মোটরের ভোল্টেজ এবং দিক (Polarity) পরিবর্তন করে। এর ফলে মোটরটি ক্লকওয়াইজ বা অ্যান্টি-ক্লকওয়াইজ ঘুরতে পারে।
কানেকশন ও সার্কিট ডায়াগ্রাম (Connection Diagram)

প্রোগ্রাম কোড (Source Code)
#include <AFMotor.h> // মোটর লাইব্রেরি অন্তর্ভুক্ত করা হলো
AF_DCMotor motor(1); // ১ নম্বর পোর্টে মোটর কানেক্ট করা হয়েছে
void setup() {
motor.setSpeed(200); // মোটরের গতি ২০০ সেট করা হলো (০-২৫৫)
motor.run(RELEASE); // শুরুর দিকে মোটর বন্ধ থাকবে
}
void loop() {
motor.run(FORWARD); // মোটর সামনের দিকে ঘুরবে
delay(2000); // ২ সেকেন্ড অপেক্ষা
motor.run(BACKWARD); // মোটর উল্টো দিকে ঘুরবে
delay(2000); // ২ সেকেন্ড অপেক্ষা
}
..., ... থেকে
...এইমাত্র অর্ডার করেছেন • ...