আরডুইনোর সাথে L298N Motor Driver ইন্টারফেসিং ও ব্যবহার গাইড
### পরিচিতি
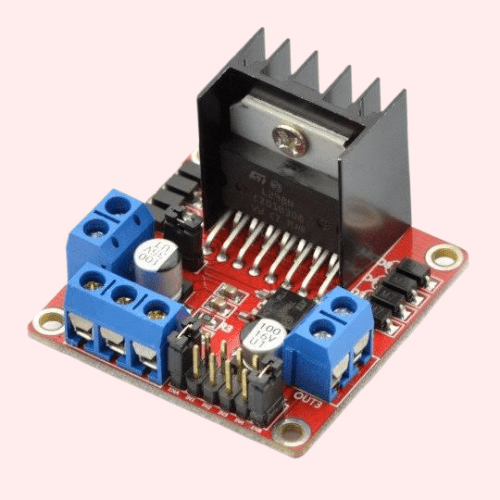
L298N হলো একটি অত্যন্ত জনপ্রিয় ডুয়াল এইচ-ব্রিজ (Dual H-Bridge) মোটর ড্রাইভার মডিউল। এটি মূলত ডিসি মোটর এবং স্টেপার মোটর নিয়ন্ত্রণের জন্য ব্যবহৃত হয়। এর মাধ্যমে একই সাথে দুটি ডিসি মোটর নিয়ন্ত্রণ করা যায় এবং মোটরের ঘূর্ণনের দিক (Direction) ও গতি (Speed) পরিবর্তন করা সম্ভব।
### প্রয়োজনীয় পার্টস
১. L298N Motor Driver মডিউল
২. আরডুইনো উনো (Arduino Uno)
৩. ডিসি মোটর (২টি)
৪. ব্যাটারি (৯ভি বা ১২ভি)
৫. জাম্পার ওয়্যার
### সার্কিট কানেকশন
১. **L298N এর VCC পিন:** ব্যাটারির পজিটিভ (+) টার্মিনালের সাথে যুক্ত করুন।
২. **L298N এর GND পিন:** ব্যাটারির নেগেটিভ (-) এবং আরডুইনোর GND পিনের সাথে যুক্ত করুন (Common Ground)।
৩. **L298N এর IN1 ও IN2:** আরডুইনোর ডিজিটাল পিন ৮ ও ৯ এর সাথে যুক্ত করুন।
৪. **L298N এর IN3 ও IN4:** আরডুইনোর ডিজিটাল পিন ১০ ও ১১ এর সাথে যুক্ত করুন।
৫. **মোটর আউটপুট:** মোটরগুলো L298N এর আউটপুট টার্মিনালে কানেক্ট করুন।
### কিভাবে কাজ করে
L298N মডিউলটি মূলত ডিজিটাল সিগন্যাল গ্রহণের মাধ্যমে কাজ করে। যখন আরডুইনো থেকে IN1 এ HIGH এবং IN2 এ LOW সিগন্যাল পাঠানো হয়, তখন মোটরটি ঘড়ির কাটার দিকে (Clockwise) ঘোরে। আবার সিগন্যাল উল্টে দিলে মোটরটি বিপরীত দিকে ঘোরে। PWM ব্যবহার করে আপনি মোটরের গতিও নিয়ন্ত্রণ করতে পারবেন।
কানেকশন ও সার্কিট ডায়াগ্রাম (Connection Diagram)

প্রোগ্রাম কোড (Source Code)
// আরডুইনো পিন সংজ্ঞা
int IN1 = 8; int IN2 = 9;
int IN3 = 10; int IN4 = 11;
void setup() {
// পিনগুলোকে আউটপুট হিসেবে সেট করা
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
// মোটর ১ এবং ২ কে সামনে চালানো
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(2000); // ২ সেকেন্ড অপেক্ষা
}
..., ... থেকে
...এইমাত্র অর্ডার করেছেন • ...